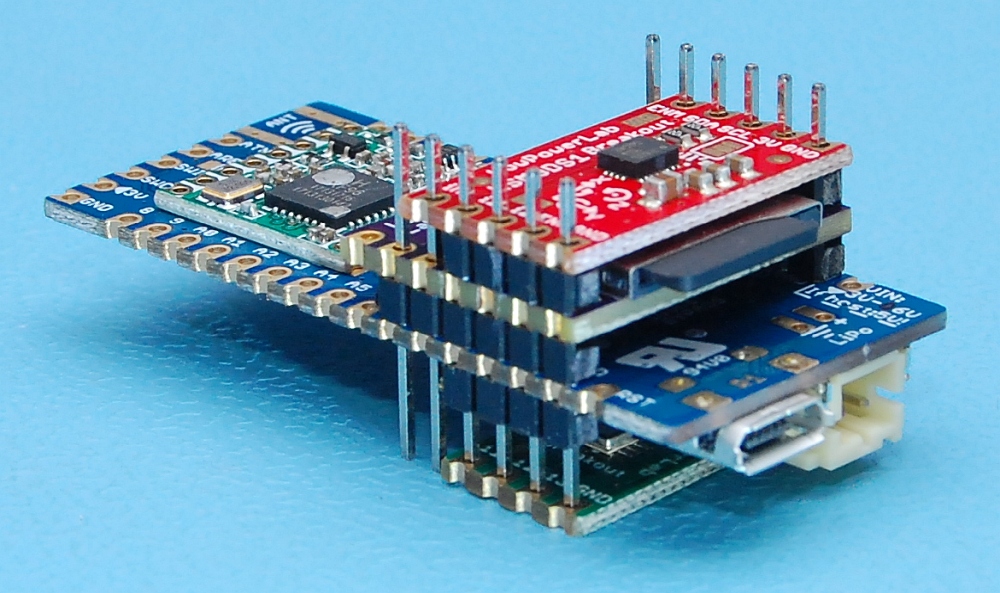
M0 Sensor Shields
There are now a few compact low-power sensor breakouts available that can flat-mount straight on the M0 PCB (bottom side).
BME280 Breakout
This breakout includes a BME280 sensor (same sensor as the popular WeatherShield):

Please see the WeatherShield guide for sample code.
LSM9DS1 9DoF IMU Breakout
There is now a 9D0F LSM9DS1 sensor breakout which includes 3 sensors in 1 chip – 3-axis accelerometer, 3-axis gyroscope and 3-axis magnetometer!

Here’s a sample sketch that you can use to get the various readings available from the LSM9DS1 sensors:
/*****************************************************************
SFE_LSM9DS1 Library Simple Example Code - I2C Interface
The LSM9DS1 is a versatile 9DOF sensor. It has a built-in
accelerometer, gyroscope, and magnetometer. Very cool!
This Arduino sketch is a demo of the simple side of the SFE_LSM9DS1 library.
It'll demo the following:
* How to create a LSM9DS1 object, using a constructor (global variables section).
* How to use the begin() function of the LSM9DS1 class.
* How to read the gyroscope, accelerometer, and magnetometer
using the readGryo(), readAccel(), readMag() functions and
the gx, gy, gz, ax, ay, az, mx, my, and mz variables.
* How to calculate actual acceleration, rotation speed,
magnetic field strength using the calcAccel(), calcGyro()
and calcMag() functions.
* How to use the data from the LSM9DS1 to calculate
orientation and heading.
This example demonstrates how to use I2C. The pin-out is as follows:
LSM9DS1 --------- Moteino
SCL ------------- SCL (A5 on Moteino/Arduino)
SDA ------------- SDA (A4 on Moteino/Arduino)
VDD ------------- 3.3V
GND ------------- GND
The LSM9DS1 has a maximum voltage of 3.6V. Make sure you power it
off the 3.3V rail! I2C pins are open-drain, so you'll be
(mostly) safe connecting the LSM9DS1's SCL and SDA pins
directly to a Moteino/Arduino.
Code by Jim Lindblom @ SparkFun Electronics
Adapted for MoteinoM0 by Felix Rusu, LowPowerLab.com
Original Creation Date: April 30, 2015
Distributed as-is; no warranty is given.
*****************************************************************/
// The SFE_LSM9DS1 library requires both Wire and SPI be
// included BEFORE including the 9DS1 library.
#include <Wire.h>
#include <SPI.h>
#include <SparkFunLSM9DS1.h>
#ifdef MOTEINO_ZERO
#ifdef SERIAL_PORT_USBVIRTUAL
#define Serial SERIAL_PORT_USBVIRTUAL // Required for Serial on Zero based boards
#endif
#endif
//////////////////////////
// LSM9DS1 Library Init //
//////////////////////////
// Use the LSM9DS1 class to create an object
LSM9DS1 imu;
///////////////////////
// Example I2C Setup //
///////////////////////
// SDO_XM and SDO_G are both pulled high, so our addresses are:
#define LSM9DS1_M 0x1E // Would be 0x1C if SDO_M is LOW
#define LSM9DS1_AG 0x6B // Would be 0x6A if SDO_AG is LOW
////////////////////////////
// Sketch Output Settings //
////////////////////////////
#define PRINT_CALCULATED
//#define PRINT_RAW
#define PRINT_SPEED 1000 // 250 ms between prints
// Earth's magnetic field varies by location. Add or subtract
// a declination to get a more accurate heading. Calculate
// your's here:
// http://www.ngdc.noaa.gov/geomag-web/#declination
#define DECLINATION -8.58 // Declination (degrees) in Boulder, CO.
#ifdef MOTEINO_ZERO
#ifdef SERIAL_PORT_USBVIRTUAL
#define Serial SERIAL_PORT_USBVIRTUAL // Required for Serial on Zero based boards
#endif
#endif
void setup()
{
pinMode(LED_BUILTIN,OUTPUT);
Serial.begin(115200);
Wire.begin();
delay(2000);
}
byte imuSetup() {
// Before initializing the IMU, there are a few settings
// we may need to adjust. Use the settings struct to set
// the device's communication mode and addresses:
imu.settings.device.commInterface = IMU_MODE_I2C;
imu.settings.device.mAddress = LSM9DS1_M;
imu.settings.device.agAddress = LSM9DS1_AG;
// The above lines will only take effect AFTER calling
// imu.begin(), which verifies communication with the IMU
// and turns it on.
if (!imu.begin())
{
Serial.println("Failed to communicate with LSM9DS1.");
Serial.println("Double-check wiring.");
Serial.println("Default settings in this sketch will " \
"work for an out of the box LSM9DS1 " \
"Breakout, but may need to be modified " \
"if the board jumpers are.");
return false;
}
return true;
}
void loop()
{
if (imuSetup()) {
printGyro(); // Print "G: gx, gy, gz"
printAccel(); // Print "A: ax, ay, az"
printMag(); // Print "M: mx, my, mz"
// Print the heading and orientation for fun!
// Call print attitude. The LSM9DS1's magnetometer x and y axes are opposite to the accelerometer, so my and mx are substituted for each other.
printAttitude(imu.ax, imu.ay, imu.az, -imu.my, -imu.mx, imu.mz);
Serial.println();
}
delay(PRINT_SPEED);
//imu.sleepGyro();
}
void printGyro()
{
// To read from the gyroscope, you must first call the
// readGyro() function. When this exits, it'll update the
// gx, gy, and gz variables with the most current data.
imu.readGyro();
// Now we can use the gx, gy, and gz variables as we please.
// Either print them as raw ADC values, or calculated in DPS.
Serial.print("G: ");
#ifdef PRINT_CALCULATED
// If you want to print calculated values, you can use the
// calcGyro helper function to convert a raw ADC value to
// DPS. Give the function the value that you want to convert.
Serial.print(imu.calcGyro(imu.gx), 2);
Serial.print(", ");
Serial.print(imu.calcGyro(imu.gy), 2);
Serial.print(", ");
Serial.print(imu.calcGyro(imu.gz), 2);
Serial.println(" deg/s");
#elif defined PRINT_RAW
Serial.print(imu.gx);
Serial.print(", ");
Serial.print(imu.gy);
Serial.print(", ");
Serial.println(imu.gz);
#endif
}
void printAccel()
{
// To read from the accelerometer, you must first call the
// readAccel() function. When this exits, it'll update the
// ax, ay, and az variables with the most current data.
imu.readAccel();
// Now we can use the ax, ay, and az variables as we please.
// Either print them as raw ADC values, or calculated in g's.
Serial.print("A: ");
#ifdef PRINT_CALCULATED
// If you want to print calculated values, you can use the
// calcAccel helper function to convert a raw ADC value to
// g's. Give the function the value that you want to convert.
Serial.print(imu.calcAccel(imu.ax), 2);
Serial.print(", ");
Serial.print(imu.calcAccel(imu.ay), 2);
Serial.print(", ");
Serial.print(imu.calcAccel(imu.az), 2);
Serial.println(" g");
#elif defined PRINT_RAW
Serial.print(imu.ax);
Serial.print(", ");
Serial.print(imu.ay);
Serial.print(", ");
Serial.println(imu.az);
#endif
}
void printMag()
{
// To read from the magnetometer, you must first call the
// readMag() function. When this exits, it'll update the
// mx, my, and mz variables with the most current data.
imu.readMag();
// Now we can use the mx, my, and mz variables as we please.
// Either print them as raw ADC values, or calculated in Gauss.
Serial.print("M: ");
#ifdef PRINT_CALCULATED
// If you want to print calculated values, you can use the
// calcMag helper function to convert a raw ADC value to
// Gauss. Give the function the value that you want to convert.
Serial.print(imu.calcMag(imu.mx), 2);
Serial.print(", ");
Serial.print(imu.calcMag(imu.my), 2);
Serial.print(", ");
Serial.print(imu.calcMag(imu.mz), 2);
Serial.println(" gauss");
#elif defined PRINT_RAW
Serial.print(imu.mx);
Serial.print(", ");
Serial.print(imu.my);
Serial.print(", ");
Serial.println(imu.mz);
#endif
}
// Calculate pitch, roll, and heading.
// Pitch/roll calculations take from this app note:
// http://cache.freescale.com/files/sensors/doc/app_note/AN3461.pdf?fpsp=1
// Heading calculations taken from this app note:
// http://www51.honeywell.com/aero/common/documents/myaerospacecatalog-documents/Defense_Brochures-documents/Magnetic__Literature_Application_notes-documents/AN203_Compass_Heading_Using_Magnetometers.pdf
void printAttitude(
float ax, float ay, float az, float mx, float my, float mz)
{
float roll = atan2(ay, az);
float pitch = atan2(-ax, sqrt(ay * ay + az * az));
float heading;
if (my == 0)
heading = (mx < 0) ? 180.0 : 0;
else
heading = atan2(mx, my);
heading -= DECLINATION * PI / 180;
if (heading > PI) heading -= (2 * PI);
else if (heading < -PI) heading += (2 * PI);
else if (heading < 0) heading += 2 * PI;
// Convert everything from radians to degrees:
heading *= 180.0 / PI;
pitch *= 180.0 / PI;
roll *= 180.0 / PI;
Serial.print("Pitch, Roll: ");
Serial.print(pitch, 2);
Serial.print(", ");
Serial.println(roll, 2);
Serial.print("Heading: "); Serial.println(heading, 2);
}SD-card Logger Breakout
Need a few gigs of logging memory to complement your MoteinoM0 or other wireless projects? It's no problem with this mini SD-card breakout which includes a power switch to put your SD-Card to sleep.

Here's a simple sketch for MoteinoM0 that will read the SD-Card content then sleep the SD card and everything else (radio, FLASH-MEM, if any) for sub 10uA sleep:
/*****************************************************************
LowPowerLab SD-card Breakout Listfiles Example Sketch
This example shows how to list the files on an SD card
For MoteinoM0 this can be flat-mounted on the PCB, just align with SPI pins
Wiring for use with other Moteinos/Arduinos using SPI bus:
MOSI - pin 11
MISO - pin 12
CLK - pin 13
CS - pin 4
*****************************************************************/
#include <SPI.h>
#include <SD.h>
#include <SPIFlash.h> //get it here: https://www.github.com/lowpowerlab/spiflash
#include <RFM69.h> //get it here: https://www.github.com/lowpowerlab/rfm69
/****************************************************************/
#define NODEID 2 //must be unique for each node on same network (range up to 254, 255 is used for broadcast)
#define NETWORKID 100 //the same on all nodes that talk to each other (range up to 255)
#define GATEWAYID 1
#define FREQUENCY RF69_915MHZ
#define IS_RFM69HW_HCW //uncomment only for RFM69HW! Leave out if you have RFM69W!
/****************************************************************/
#ifdef MOTEINO_M0
#define SD_CS 10
#define SD_ON 11
#endif
#define BOARD_MOSI_PORT (1)
#define BOARD_MOSI_PIN (10)
#define BOARD_MISO_PORT (0)
#define BOARD_MISO_PIN (12)
#define BOARD_SCK_PORT (1)
#define BOARD_SCK_PIN (11)
//#define SS_PORT (1)
//#define SS_PIN (9)
#define SD_CS_PORT (0)
#define SD_CS_PIN (18)
RFM69 radio; //#if defined (__AVR_ATmega32U4__) RFM69 radio(8,7);
SPIFlash flash(SS_FLASHMEM, 0xEF30); //EF30 for 4mbit Windbond chip (W25X40CL)
File root;
void setup() {
pinMode(LED_BUILTIN, OUTPUT);
pinMode(SS_FLASHMEM, OUTPUT);
pinMode(A2, OUTPUT);
pinMode(SD_CS, OUTPUT);
pinMode(SD_ON, OUTPUT);
digitalWrite(SS_FLASHMEM, HIGH);
digitalWrite(A2, HIGH);
digitalWrite(SD_CS, HIGH);
digitalWrite(SD_ON, HIGH);
Serial.begin(115200);
delay(5000);
if (radio.initialize(FREQUENCY,NODEID,NETWORKID))
{
Serial.println("Radio init OK, putting it to sleep...");
radio.sleep();
}
else {
Serial.println("Radio init fail, moving on...");
//return;
}
if (flash.initialize())
{
Serial.println("Flash-MEM init OK, putting it to sleep...");
flash.sleep();
}
else {
Serial.println("Flash init fail, moving on...");
//return;
}
digitalWrite(SD_ON, LOW); //SD power ON
if (SD.begin(SD_CS))
{
Serial.println("SD card init OK, listing content...");
root = SD.open("/");
printDirectory(root, 0);
Serial.println("done!");
}
else {
Serial.println("SD card init fail, moving on");
//return;
}
digitalWrite(LED_BUILTIN, HIGH);
Serial.println("Sleeping MCU in 3 seconds...");
delay(3000);
digitalWrite(LED_BUILTIN, LOW);
digitalWrite(SD_ON, HIGH); //SD power OFF
//reset SD CS direction to ensure there is no drainage
PORT->Group[SD_CS_PORT].OUTCLR.reg = (1<<SD_CS_PIN);
PORT->Group[SD_CS_PORT].DIRCLR.reg = (1<<SD_CS_PIN);
PORT->Group[BOARD_MOSI_PORT].PINCFG[BOARD_MOSI_PIN].reg = 0;
Serial.flush();
delay(5000);
standbySleep(); //puts the M0 to "forever" deep sleep for lowest power sleep mode
}
void loop() {
//nothing here
}
void printDirectory(File dir, int numTabs) {
while (true) {
File entry = dir.openNextFile();
if (! entry) {
// no more files
break;
}
for (uint8_t i = 0; i < numTabs; i++) {
Serial.print('\t');
}
Serial.print(entry.name());
if (entry.isDirectory()) {
Serial.println("/");
printDirectory(entry, numTabs + 1);
} else {
// files have sizes, directories do not
Serial.print("\t\t");
Serial.println(entry.size(), DEC);
}
entry.close();
}
}
void standbySleep() {
// Set sleep mode
SCB->SCR |= SCB_SCR_SLEEPDEEP_Msk;
//Disable USB
USB->DEVICE.CTRLA.reg &= ~USB_CTRLA_ENABLE;
//Enter sleep mode
__WFI();
//...Sleep forever
//Enable USB
USB->DEVICE.CTRLA.reg |= USB_CTRLA_ENABLE;
}As can be seen in the commented code, here are the required connections for this breakout (also marked on the silkscreen):
- SPI pins (MI, MO, SCK, CS)
- power (3V, GND)
- EN (power enable) - this needs to go LOW as in the sample code to provide power to the SD card
- CD (card detect) - this one has an OPEN solder jumper, this pin is not commonly used
Nothing stops you to mount all three of the above breakouts on a single Moteino M0, just be careful to align the pins correctly!